See CATPOO 2021 — A New Beginning for an overview of the whole project.
Way back when, I designed that I wanted to learn how to create a circuit board from scratch. It was fun and I learned a lot. Unfortunately, one of the things that I learned was it takes forever to build proper circuits. It also costs a lot. For someone like myself who’s learning, it’s best to simply use some permaproto style Raspberry Pi HATs. Using 20mm standoffs and doubling up some stacking headers gives me plenty of space.
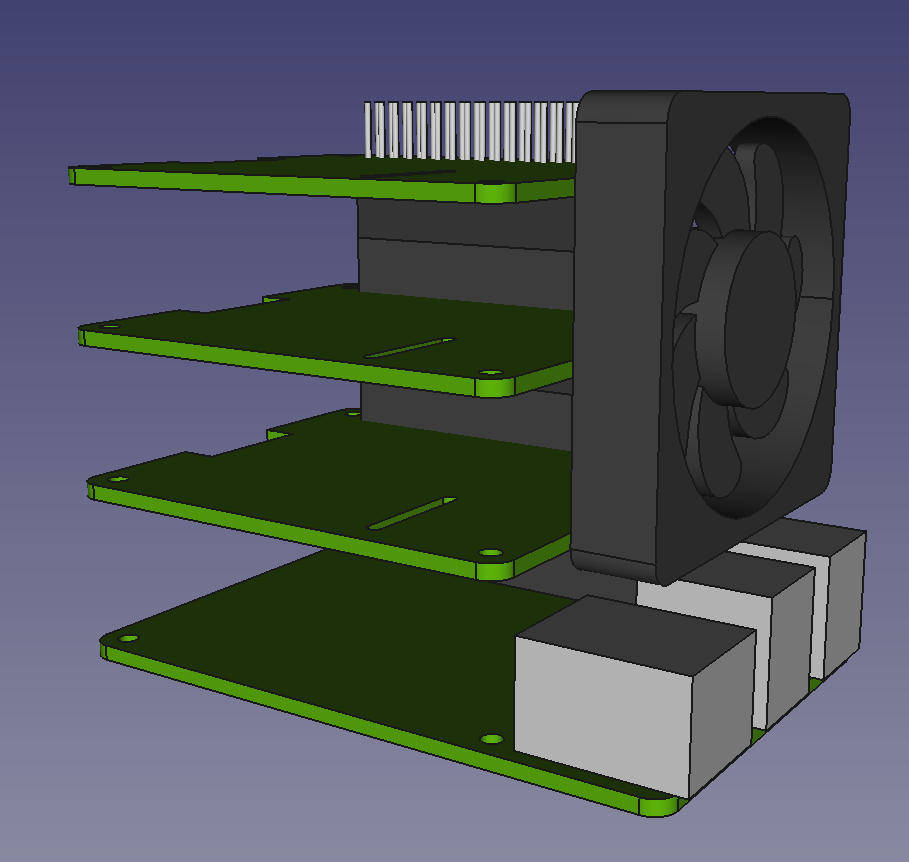
While this isn’t very space efficient, it still would fit inside of 4″ cube which is small enough for my purposes.
Layer Overview
- Raspberry Pi
- Nothing special here
- Leaning towards using the 20mm standoffs to allow more air flow over the CPU
- Motors 1 and 2
- Include at least 1 massive capacitor for the motors
- An additional capacitor right where the power enters would be nice too
- Motors 3 and 4
- Don’t forget those capacitors
- Sensors
- 4 channel ADC board with i2c interface for the range finders
- Accelerometer with i2c interface
Build Notes
- Check wiring twice, solder once
- I ended up going with the solder trice, check nonce.
- Hours were wasted, but I’ve become even more confident in my soldering skills
- Getting the standoffs to match up with the stacked headers was a larger pain than anticipated.
- Making the accelerometer circuit board perfectly level was impossible.
- Some sort of calibration step will be necessary.
- The range finders require 5v power but output in 3.3v logic.
- This could’ve explained issues that I had in the past on the Arduino. I remember vaguely issues with not getting the range of values that I was expecting.
- This strategy of doing outrageous RPi HATs works surprisingly well.
- Doing the separate daughter board with the 40pin ribbon cable is actually more cumbersome than vertically stacking.
- This obviously only works well where I can go high. A more flat, pancake shaped robot wouldn’t work.