It took a couple weeks, but got a whole new design. Hit pretty much all the targets I mentioned in the previous post.
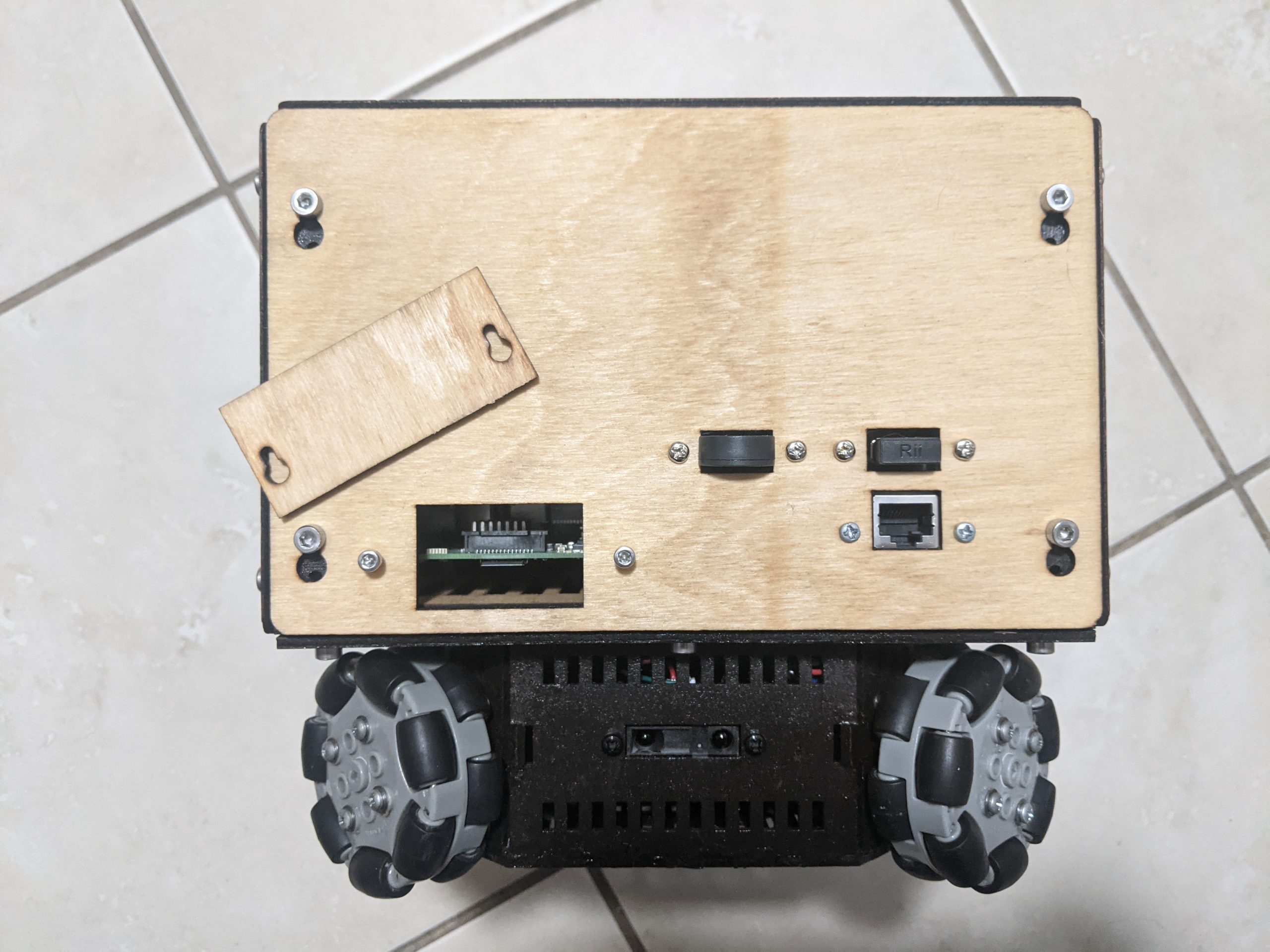
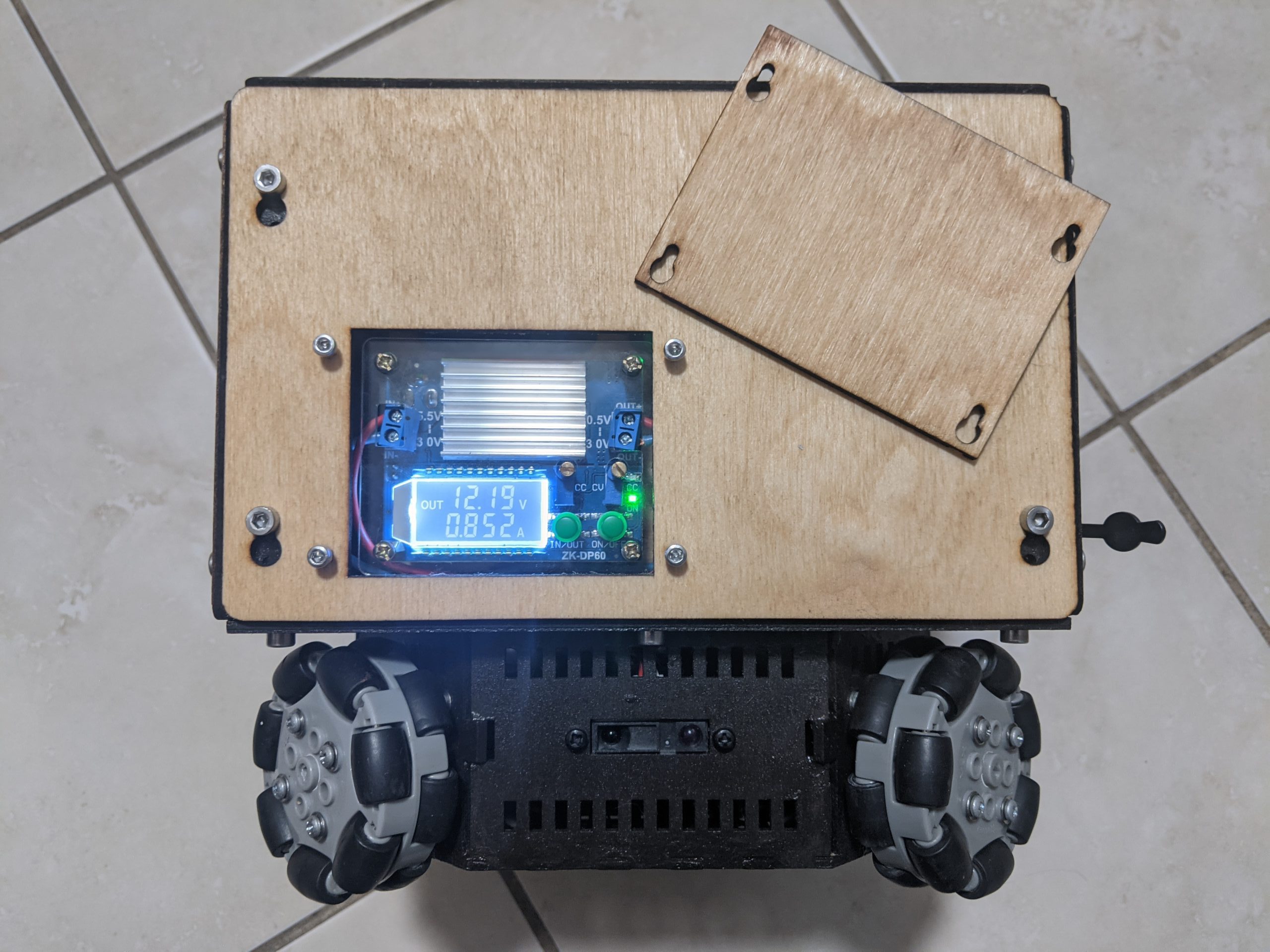
Only issue that I ran into so far is that the audio isn’t working, which sucks as that’s all on the bottom layer. The audio, range finders, and motors are all in a tangled mess in the least accessible area of the robot. Fortunately, fixing this gives me a great opportunity to do a proper tear down, showing off the design of the robot.
Currently, everything else seems to be working. I2C sees the accelerometer, gyroscope,and range finder ADC. The stepper drivers are able to lock the wheels, and make them turn. The new night vision camera’s wider FOV (130°) really helps, but I’d have preferred something closer to 160°-170°. Unfortunately, I can’t find anything in that range so this will do for now.
After the speaker repairs, it’s time to do the fun part: low level control of the motors and sensors exposed by a REST API.
Here are some photos, in the meantime, before the coding and YouTube videos start appearing.