OMTech’s July 4th sale this year changed my life. For basically the same cost as 2 or 3 iPhones, I instead received a 60W CO2 laser.
Since then, I’ve spent at least 12 hours every week playing around and learning as much as possible. It’s been some time since I’ve been able to feel like a autodidactic kid again.
I’m most proud of my first end table and arcade cabinets. This is only the start, so eventually I’ll need to start selling my projects or I’ll need a much bigger house.
Oh, and work’s been very busy. Can’t believe it’s been 18 months since I had enough free time to do something noteworthy…
It was sometime after the initial Sniffle Snafu Panic of 2020 that I realized I’d not updated my website in years. It’s unfortunate, but a cold hard fact of life that microscopic entities can be deadly. Bad times are inevitable if there’s a bad enough pathogen, and there will be death. That we’ve had. We should be reminded that we all should be grateful to be alive every day.
Around that time there was the proposal of 15 days to slow the spread. Expecting to bunker down for only a short period, I resolved myself to make a new website. I knew I’d not be in the office for a couple weeks. Fast forward many moons to the present year, and I’d still not yet accomplished my original goal. I’ve still not been back in the office.
It seems that they should have said 15 months to slow the spread…
That said, it’s been more than a few weeks. Time to go on doing what I can. Time to update this website.
It’s been some time since I’ve posted on this blog. Now I’ve actually been working on projects worth mentioning, the long period of neglect is over.
Sometime in fall of 2017, I decided to see what kind of robot I could make. Since going down the rabbit hole, the biggest hurdles faced thus far:
Learning how to model in 3D.
Electrical engineering in general.
Mechanical engineering in general.
Explaining why I’m doing this.
I’m no expert in the first three after less than a year of learning. I never expected to be. I only wanted to know enough to accomplish my goal: build a proper robot.
What makes a “proper” robot? I’ve decided upon these criteria:
It has to be built entirely from open-source tools and designs.
It has to be remotely controllable from a cell phone or tablet.
It has to have a high resolution camera and should have night vision.
It should have additional sensors to avoid hazards in the environment.
It should powered by an Arduino and Raspberry Pi together to allow future software updates for expanded functionality.
Now that I’ve accomplished those goals, I’ve moved on to the polishing phase. Part of that phase includes writing things up in such a way that anyone else in the world could create the same robot.
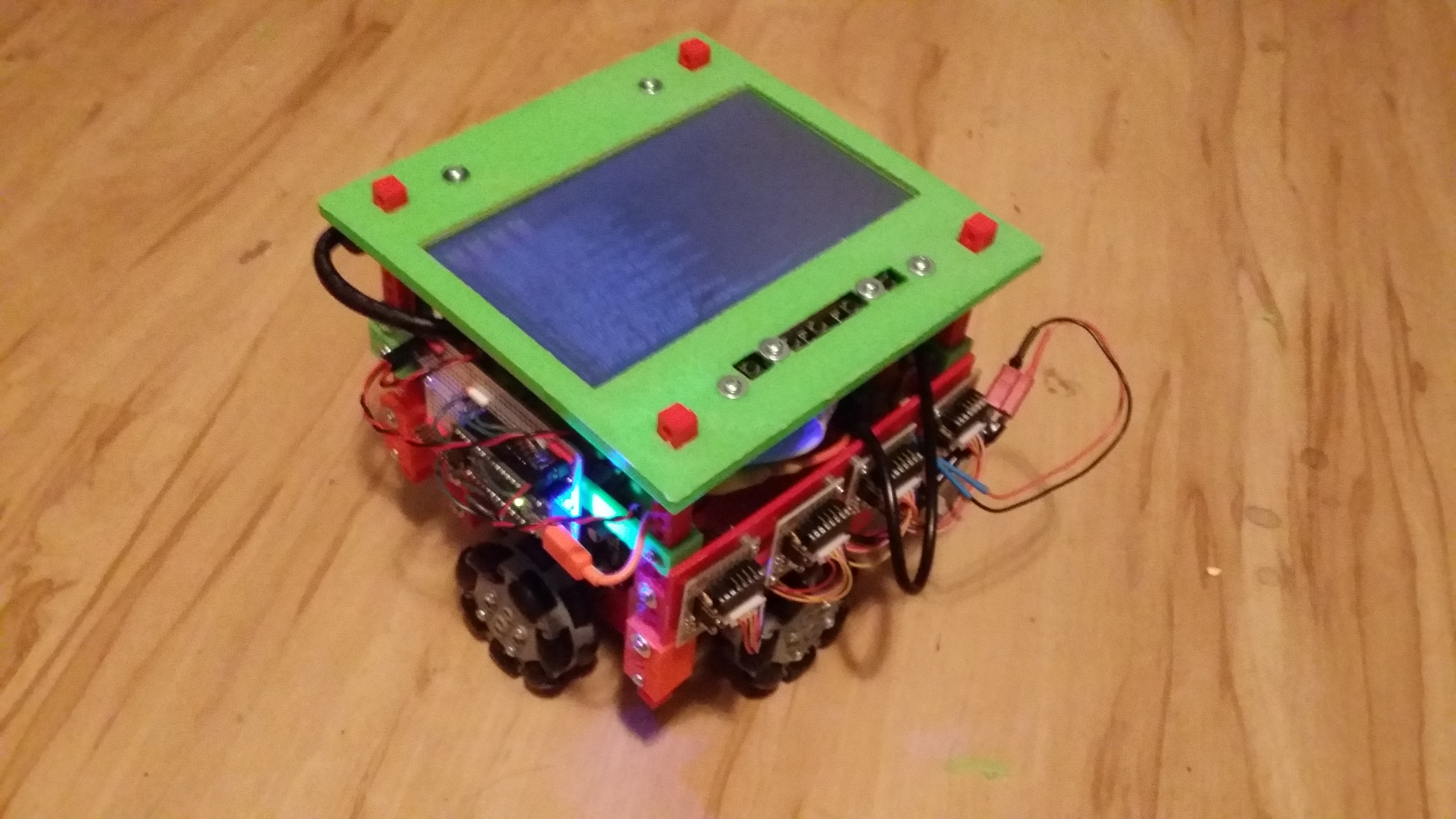
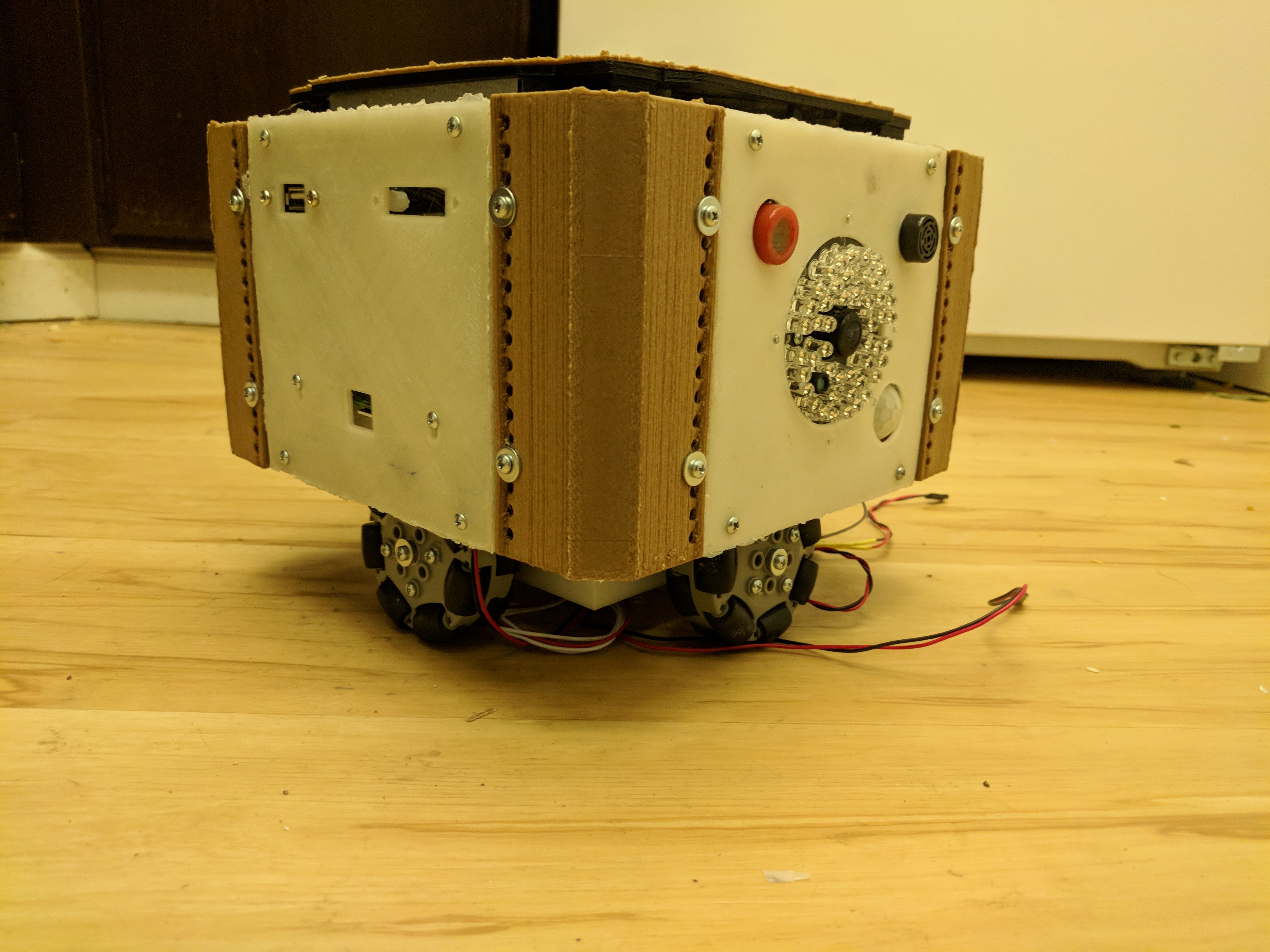
In the mean time, here are some pictures from along the way:
Late 2017 Prototype
Early 2018 prototype
Mid 2018 Prototype with its top off on the pool table