It’s been some time since I’ve posted on this blog. Now I’ve actually been working on projects worth mentioning, the long period of neglect is over.
Sometime in fall of 2017, I decided to see what kind of robot I could make. Since going down the rabbit hole, the biggest hurdles faced thus far:
- Learning how to model in 3D.
- Electrical engineering in general.
- Mechanical engineering in general.
- Explaining why I’m doing this.
I’m no expert in the first three after less than a year of learning. I never expected to be. I only wanted to know enough to accomplish my goal: build a proper robot.
What makes a “proper” robot? I’ve decided upon these criteria:
- It has to be built entirely from open-source tools and designs.
- It has to be remotely controllable from a cell phone or tablet.
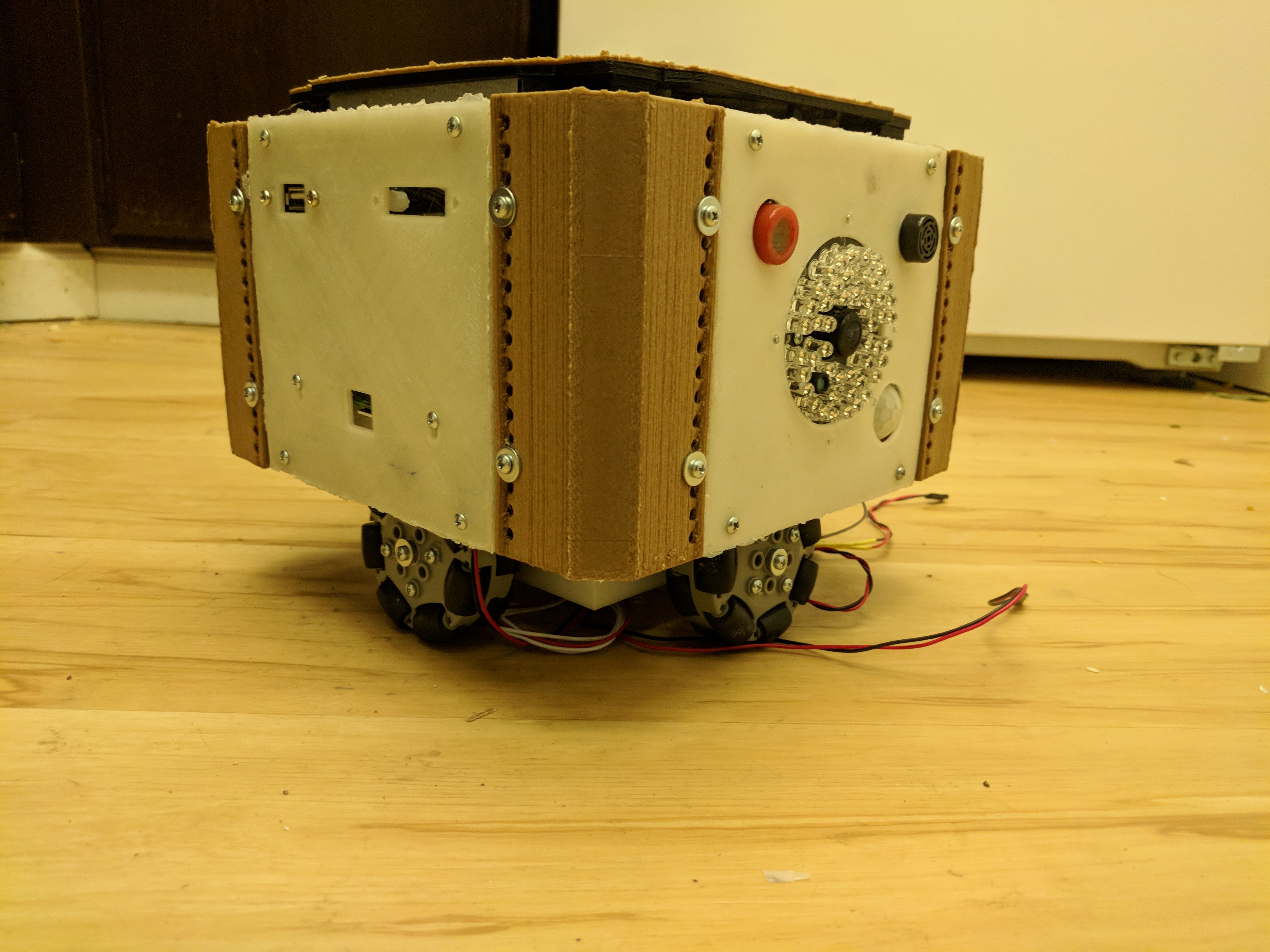
- It has to have a high resolution camera and should have night vision.
- It should have additional sensors to avoid hazards in the environment.
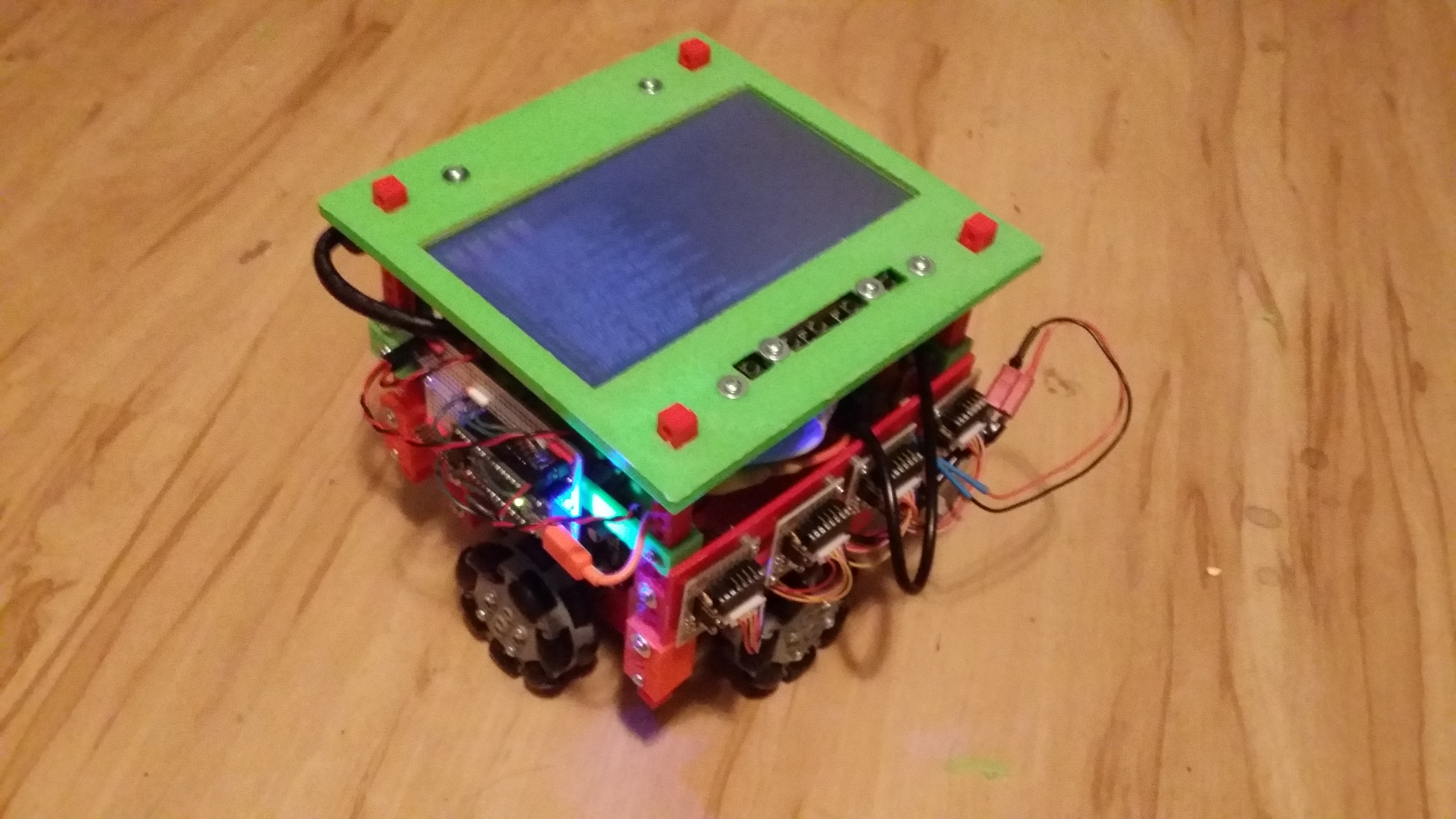
- It should powered by an Arduino and Raspberry Pi together to allow future software updates for expanded functionality.
Now that I’ve accomplished those goals, I’ve moved on to the polishing phase. Part of that phase includes writing things up in such a way that anyone else in the world could create the same robot.
In the mean time, here are some pictures from along the way: